


4 моноколеса и у вас машина
полный обзор на чудо-телегу чуть позже скину
полный обзор на чудо-телегу чуть позже скину
Наконец-то два круглых черенка Д16Т пригодились, 4 переустановки и готово






Всем привет! Недавно, вдохновившись моим опытом, мой товарищ решил приобщиться к моноколёсному комьюнити и купил моноколесо Inmotion V12 Pro. В целом колесо достаточно хорошее, но первая совместная поездка выявила одну проблему, а именно: практически невидимые задние сигналы. Этот недостаток не добавляет безопасности поездкам, поэтому, как всегда, я спешу исправить ситуацию. А что из этого вышло — читайте далее.
Да, совместная поездка на моноколёсах без сигналов добавляет немного экстрима, но всё же лучше исправить ситуацию и наслаждаться безопасными поездками с чётко читаемыми сигналами. Так как временные рамки не позволяли купить готовый вариант умного стоп-сигнала, я решил собрать свой DIY-вариант, потратив на разработку и сборку менее двух часов. По традиции проект будет состоять из компонентов, которые уже есть у меня в наличии.
Итак, так как было решено собирать умный сигнал, нам понадобятся следующие компоненты:
Красные яркие светодиоды 5 мм.
Как правило, они всегда лежат в запасе, купленные ещё в «нормальные времена». А если нет, то можно купить по цене семечек на Алиэкспрессе:
Скриншот
Микроконтроллер;
Здесь нужно компактное решение. У меня пару месяцев валялась без дела одна из вариаций платы ESP32-C3-Zero — будем использовать её:

ESP-32-С3-SuperMini
Датчик положения в пространстве;
В данном проекте я буду использовать трёхосевой гироскоп MPU6050. У меня их «горка и маленькая кучка» — остались ещё с прошлых экспериментов:
Трёхосевой гироскоп MPU6050
Дополнительные компоненты.
N-канальный мосфет P0603BDG для управления матрицей светодиодов и несколько резисторов на 100 Ом.
Ниже представлена принципиальная схема моего стоп-сигнала:
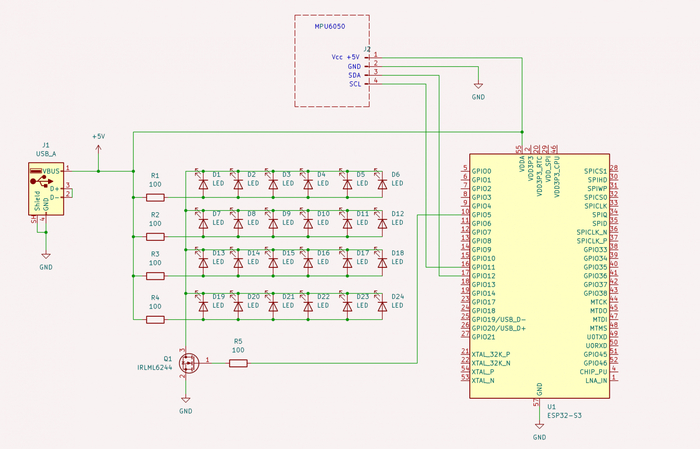
Принципиальная схема стоп-сигнала
Принцип работы очень прост: для работы сигнала нам нужно отслеживать данные с акселерометра MPU6050 и при наличии отрицательного ускорения по оси Y зажигать матрицу светодиодов.
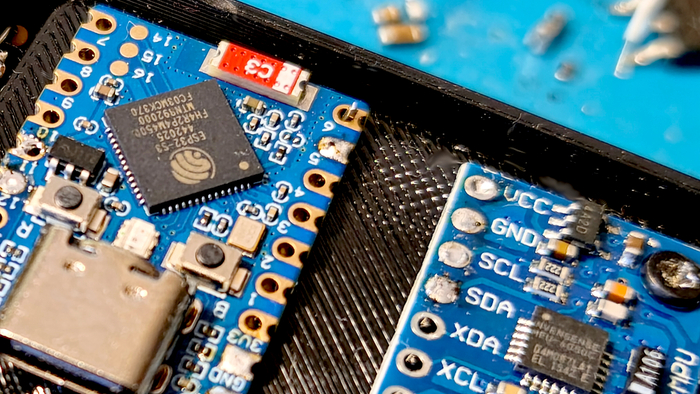
Для дальнейших экспериментов собираем минимальный сет из датчика и отладочной платы. Затем, «абы как» припаиваем датчик и начинаем эксперименты:
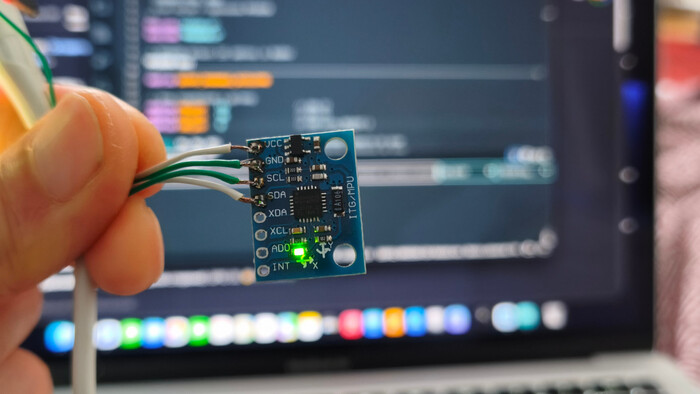
Подключение акселерометра MPU6050
И загрузив первую попавшуюся библиотеку MPU6050 начинаем эксперименты:
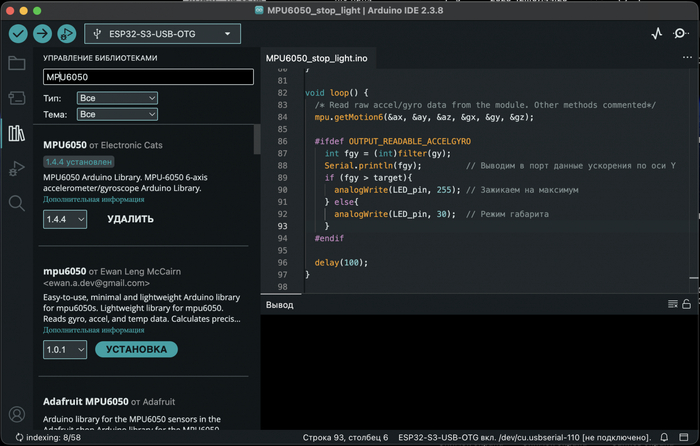
Библиотека MPU6050 в Arduino IDE
После установки библиотеки загружаем из примеров скетч MPU6050_Raw и закомментируем в нём следующие строки:
/*Print the obtained data on the defined format*/
#ifdef OUTPUT_READABLE_ACCELGYRO
//Serial.print("a/g:\t");
//Serial.print(ax); Serial.print("\t");
//Serial.print(ay); Serial.print("\t");
//Serial.print(az); Serial.print("\t");
//Serial.print(gx); Serial.print("\t");
//Serial.print(gy); Serial.print("\t");
//Serial.println(gz);
Serial.print(gy); // Выводим в консоль значения ускорения по оси Y
#endif
Далее загружаем код в отладочную плату и запускаем в среде вывод значений в виде графика. Затем мы сможем наблюдать следующий результат, если подвигаем датчик по направлению оси Y вперед-назад:
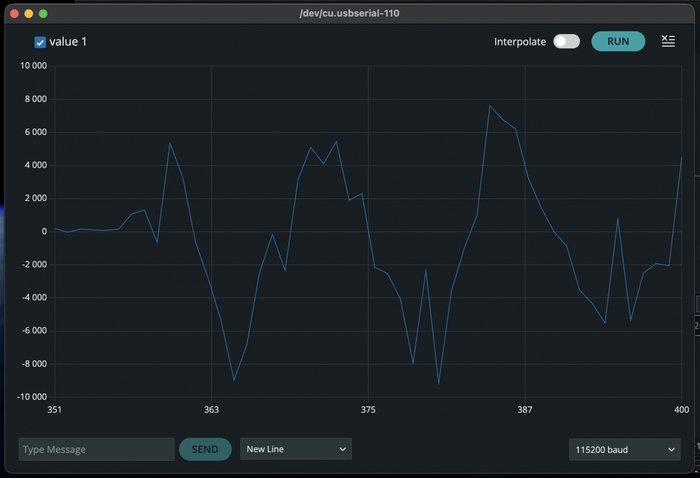
Вывод сырых данных ускорения по оси Y
Здесь мы наблюдаем положительное и отрицательное ускорение по оси Y. Данные при этом достаточно шумные, поэтому далее нам нужно их сгладить. Обычно это делается с помощью фильтра Калмана. После обработки сигнала датчика данным фильтром мы сможем наблюдать следующее:
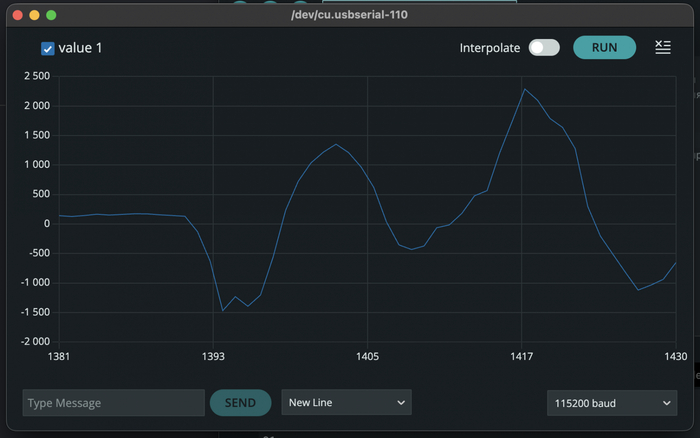
Данные после фильтрации
Теперь мы можем использовать далее данные в нашей логике управления зажигания матрицы:
int target = 600; // Значение, за которым включается стоп-сигнал (отрицательное ускорение)
int fgy = (int)filter(gy);
Serial.println(fgy); // Выводим в порт данные ускорения по оси Y
if (fgy > target){
analogWrite(LED_pin, 255); // Зажикаем на максимум
} else{
analogWrite(LED_pin, 30); // Режим габарита
}
По моей задумке, стоп-сигнал должен работать в двух режимах: габаритного огня (яркость 20%) и сигнала торможения (яркость 100%). Для этой цели и используется ШИМ-регулирование в представленном коде, а сам порог зажигания стоп-сигнала определяется переменной target, значение которой зависит от необходимой границы отрицательного ускорения.
Код прошивки можно посмотреть тут.
Для разработки корпуса я, как всегда, использую FreeCAD. Сам корпус имеет довольно простую конструкцию: сборка выполняется без единого болта, по принципу матрёшки. Ниже представлен скриншот проекта:
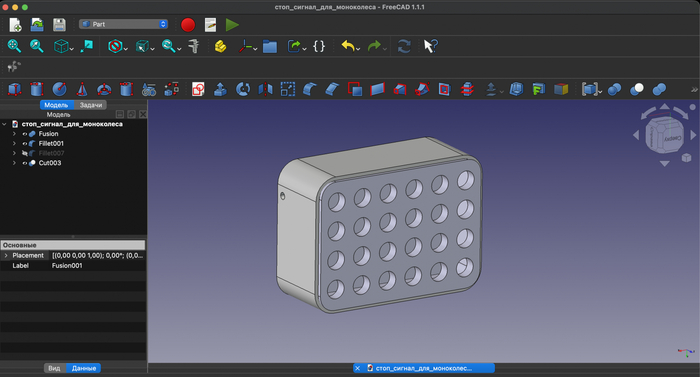
Проект корпуса
Печать корпуса выполнялась на моём 3D принтере Flashforge Adventurer 5M и заняла не более двадцати минут.
Самый интересный момент — когда твоя задумка воплощается в жизнь. Вставляем светодиоды в распечатанный корпус и припаиваем элементы согласно представленной выше схеме:

Установка светодиодов в корпус
В состав корпуса входит разделяющая панель, на которую устанавливается датчик и отладочная плата:

Панель с установленным датчиком
Я очень торопился с реализацией и не предусмотрел в панели отверстия для болтов, поэтому фиксирующие датчик болты были просто вплавлены в пластик. Примерно так же было реализовано крепление платы, но в этот раз уже вплавлялись небольшие отрезки выводов, оставшиеся от ножек светодиодов, к которым позднее припаивалась отладочная плата:
Крепление отладочной платы
Аналогичным способом крепится и мосфет. А так выглядит вся электроника в сборе:
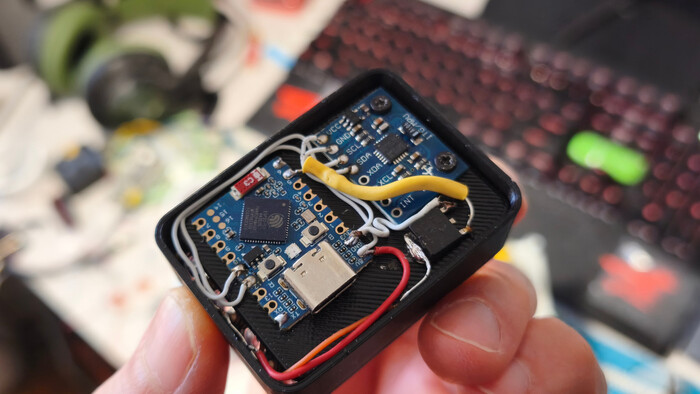
Электроника в сборе
Подключаем питающие провода и в обратной крышке герметизируем соединение:
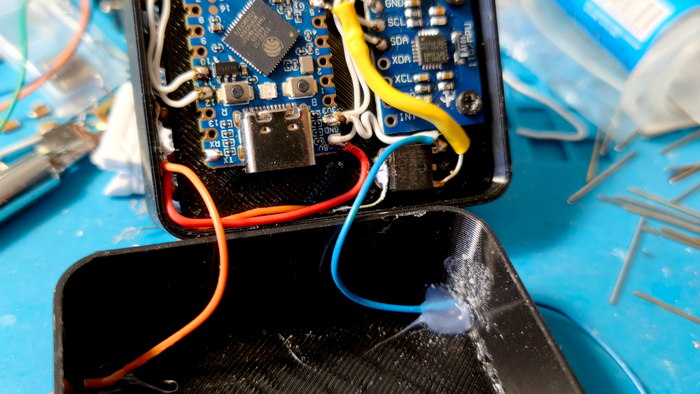
Подключение проводов и герметизация
Всё, стоп-сигнал собран:
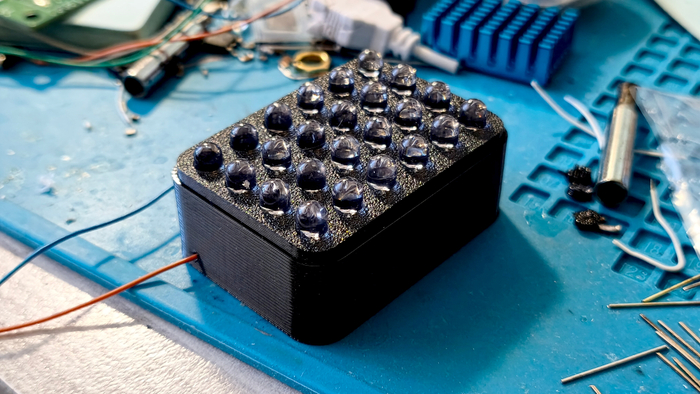
Собранный стоп-сигнал
Осталось разобраться с подключением: здесь всё просто. Моноколесо имеет USB-порт с функцией зарядки мобильных устройств, обеспечивающий достаточную мощность для работы стоп-сигнала. Его и будем использовать для питания. Для подключения используется разъем USB-A («папа»), который нужно максимально укоротить, чтобы он влез в отсек с портами при закрытой заглушке. Сам фонарь крепится на резиновую заглушку отсека моноколеса с помощью наноскотча, перед этим нужно обязательно обезжирить поверхность заглушки.

Итоговая установка
В итоге, после нескольких тестовых поездок, крепление стоп-сигнала на наноскотч оказалось очень надёжным решением.
Итоговым результатом я остался очень доволен! У меня были сомнения насчёт видимости фонаря в дневное время при прямом солнечном свете, но они не подтвердились. Стоп-сигнал очень хорошо видно даже на ярком солнце. Теперь поездки на моноколесе стали значительно комфортнее и безопаснее.
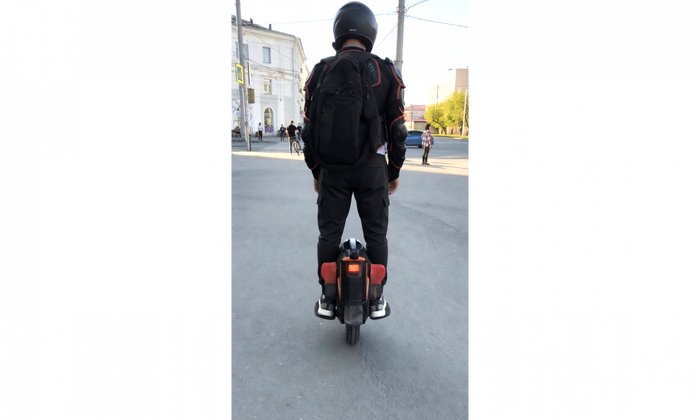
Фото из поездки
Само собой, этот стоп-сигнал можно применить не только на моноколесе, но и, например, на велосипеде. В этом случае стоит позаботиться о внешнем источнике питания. Да и данное решение будет экономически более целесообразным, чем покупка готовых решений, а удовольствие от сборки — бесценно!
На этой позитивной ноте можно и закончить статью! Спасибо за уделенное время! Интересных проектов и всех благ! А если остались вопросы или есть что добавить — добро пожаловать в комментарии.
Ссылки к статье:
Автор: CyberexTech
Написано при поддержке Timeweb Cloud ↩
Больше интересных статей и новостей в нашем блоге на Хабре и телеграм-канале.
Реклама. ООО «ТАЙМВЭБ.КЛАУД», ИНН: 7810945525
Видео позаимствовано у участника группы "Город (не важно какой) Инцидент", выложенное публично в одном из местных пабликов. Ссылку не даю, так как не желаю указывать город.
Бля, тут рекламятся все, кому не лень, я что, лысый? Или быть может я рыжий?
Вишневский - ацетилсалициловая кислота
Вайб катка под Miyagi - Utopia
Снимаю моноколёсный и гитарно-вокальный контент в качестве хобби, публикуюсь в тг канале https://t.me/SpaceRangerKRD
Ничего не продаю, ни за что не агитирую, сисек не показываю, но зато панамка для хуёв всегда широко распахнута!
Спасибо за внимание







