

Экзоскелет без панциря: 4 альтернативы внешнему каркасу (обзорная статья)
Экзоскелет без панциря: 4 альтернативы внешнему каркасу
Традиционный экзоскелет — это «скелет снаружи»: жесткая рама, повторяющая конечности и принимающая нагрузку параллельно опорно-двигательному аппарату. В основе такого подхода лежит принцип экзоскелета членистоногих: внешние трубчатые рычаги, шарниры, передача момента через точки крепления на теле.
Ключевое ограничение этой парадигмы — геометрия. Чтобы разгрузить позвоночник при подъеме 20 кг, необходимо создать альтернативный путь передачи момента силы от плеч к тазу, а затем к земле. Этот путь неизбежно проходит вне тела, и любая попытка убрать жесткий элемент из этой цепи приведет к тому, что нагрузка вернется на биологические ткани.
Тем не менее инженерная мысль уже предложила альтернативные архитектуры. Их можно разделить на четыре группы по фундаментальному принципу: эндопротезирование с активным приводом, тенсегрити-конструкции, жаккардовые блокирующие ткани и системы управляемой жесткости. Ниже дан подробный разбор каждой.
---
1. Интракорпоральные системы: скелет внутри тела
1.1. Интрамедуллярные силовые стержни
Принцип: жесткий имплантат, вводимый в костномозговой канал длинных трубчатых костей (бедренная, большеберцовая, плечевая). В отличие от пассивных штифтов для остеосинтеза, такой стержень содержит линейный привод (электромагнитный или пьезоэлектрический), который создает дополнительный момент силы, помогая конечности разгибаться при ходьбе или вставании.
Механика: имплантат фиксируется проксимально и дистально винтами, интегрируясь в кость. Питание подается индукционно — внешний пояс-катушка наводит ток в герметичном контуре имплантата. Управление — по миоэлектрическому сигналу с поверхности кожи над имплантатом: электроды считывают активность мышц, микроконтроллер интерпретирует намерение и активирует привод.
Текущий статус (2026): клинической реальностью являются только пассивные интрамедуллярные удлинители — моторизованные «гвозди» для дистракционного остеогенеза. Системы вроде Fitbone (Wittenstein, Германия) или Precice (NuVasive, США) содержат магнитный редуктор и удлиняются под действием внешнего магнитного поля. Они управляемы, имплантируемы полностью, но выполняют функцию медленной дистракции, а не динамической поддержки движения. Скорость удлинения — около 1 мм/сут; усилия, сопоставимого с мышечным, они не развивают.
Когда ждать активный интрамедуллярный экзоскелет: главная проблема — точка выхода нагрузки. При попытке создать момент разгибания в коленном суставе через интрамедуллярный привод напряжение концентрируется в дистальной точке фиксации винтами. Костная ткань не рассчитана на такие локальные циклические нагрузки и начнет резорбироваться. Требуется пересмотр геометрии винтов либо переход на остеоинтеграцию с пористыми титановыми интерфейсами — а это этап доклинических испытаний на крупных животных. Осторожный прогноз: первые активные имплантаты для опорной функции — не ранее 2035–2040 гг.
1.2. Субдермальные опорные сети
Принцип: имплантация под кожу эластичной сетки из сплава с памятью формы (NiTi, нитинол) или полимерных волокон сверхвысокой молекулярной массы (UHMWPE). Сетка крепится к фасциям и надкостнице в ключевых точках: остистые отростки позвонков, гребни подвздошных костей, акромионы лопаток. В состоянии покоя она эластична; при деформации выше пороговой (резкий наклон) переходит в мартенситную фазу и становится жесткой.
Текущий статус: в клинической практике существуют только пассивные подкожные сетки для армирования брюшной стенки после грыжесечений и для укрепления капсулы суставов (хирургическая сетка из полипропилена, Artelon). Однако они не обладают свойством переменной жесткости. Нитиноловые структуры с фазовым переходом исследуются in vitro в контексте динамической стабилизации позвоночника: в Стэнфорде (публикация 2023 г., Journal of Biomechanical Engineering) показана конструкция из переплетенных нитиноловых лент, жесткость которой возрастает на 400% при охлаждении ниже температуры фазового перехода, настроенной на 35°C (температура кожи). Обратная сторона: при физической нагрузке, когда мышцы греются, система размягчится, что противоположно желаемому. Идут поиски сплавов с обратной логикой перехода.
---
2. Тенсегрити-опоры: паутина натяжения вместо рамы
2.1. Концепция
Тенсегрити (от tension + integrity — «целостность через натяжение») — конструктивная система, где жесткие элементы работают на сжатие, но не касаются друг друга, будучи связаны непрерывной сетью растянутых тросов. В приложении к телу это означает отказ от несущих рычагов: нагрузка передается исключительно по натянутым лентам, пересекающим суставы по анатомическим линиям мышечной тяги.
Пример: пассивный поясничный тенсегрити-корсет. От тазового пояса к плечевым накладкам идут ленты из высокомодульного полиэтилена (Dyneema). При наклоне вперед задние ленты натягиваются, и их вектор натяжения создает разгибающий момент относительно центра вращения позвонков L5-S1. Математически: если расстояние от оси позвоночника до ленты — 5 см, а сила натяжения — 400 Н, создается момент 20 Н·м, компенсирующий примерно 40–50% момента от подъема груза 15 кг. Важно: это пассивная система, ей не нужен аккумулятор.
2.2. Тенсегрити с флюидной блокировкой
Механика: ленты выполнены в виде плоских герметичных камер, заполненных магнитореологической (MR) жидкостью — суспензией частиц карбонильного железа в силиконовом масле. В отсутствие магнитного поля жидкость течет, лента эластична. При подаче тока в микро-катушку, вшитую вдоль ленты, частицы выстраиваются в цепочки, и жидкость становится вязкопластичной за 5–10 мс — лента блокируется, превращаясь в жесткую тягу.
Текущий статус: MR-жидкости используются серийно в адаптивных автомобильных амортизаторах (MagneRide, Delphi) и в протезных коленных модулях (Össur Rheo Knee). В носимых системах первая коммерческая реализация — перчатка с MR-блокировкой для реабилитации после инсульта (проект Университета Окленда, выделен в стартап Imprint VR, 2025 г.). Полноценный тенсегрити-корсет с MR-лентами прошел лабораторные испытания в Гарвардской Biodesign Lab в 2024 г. Результаты: снижение компрессионной нагрузки на L4-L5 на 35% при подъеме 10 кг. Питание — 5 В, ток на блокировку — 0.3 А, вес блока управления с аккумулятором — 180 г. Ожидаемый выход на рынок для промышленного применения — 2028–2030 гг.
---
3. Жаккардовые блокирующие ткани: одежда как структура
3.1. Принцип ауксетических и оригами-паттернов
Обычная ткань при растяжении сужается в поперечном направлении (коэффициент Пуассона положительный). Ауксетики расширяются при растяжении, создавая структурную жесткость. Если связать рукав по ауксетическому паттерну, при попытке согнуть локоть в обратном направлении ткань будет стремиться расшириться, но нити переплетения создадут вектор силы, противоположный сгибанию, блокируя движение.
Оригами-ткань: в плоское полотно заложены складки типа Miura-ori. При изгибе они складываются в определенном направлении, а при попытке изгиба в противоположную сторону упираются друг в друга, делая ткань твердой в этом направлении.
3.2. Электростатическая сцепка (Electrostatic Clutch)
Механика: два слоя ткани с нанесенными на них гибкими электродами (графеновое покрытие) и диэлектриком между ними. При разности потенциалов 1–2 кВ (ток — микроамперы) между слоями возникает сила электростатического притяжения, и они прочно сцепляются за счет трения. Ткань превращается из многослойного гибкого ламината в монолит.
Реализация: изобретатель — группа проф. С. Херра (MIT Media Lab, 2021–2024). Технология лицензирована стартапом Verve Motion (США). Продукт SafeLift — это мягкий экзоскелет-жилет, который использует электромеханический привод (эластомерные ленты с мотором на кабестане), а не электростатическую сцепку. Но патентная заявка US20230263645A1 от 2023 г. описывает именно электростатическую муфту для элементов одежды. Пока что рабочая ткань с электростатической блокировкой демонстрирует усилие сдвига до 20 Н/см², чего достаточно для легкой фиксации сустава пальца, но недостаточно для блокировки колена или спины. Требуются многослойные стеки — работа над ними ведется в ETH Zurich (группа проф. Р. Вуд).
---
4. Системы на основе управляемой жесткости
4.1. Пневматические «шины» на коже (Jamming Structures)
Слоистые пневмо-карманы: под компрессионную одежду интегрируются плоские герметичные камеры, заполненные гранулированным материалом (например, молотым кофе или пластиковыми микросферами). При атмосферном давлении гранулы подвижны — камера гнется. При вакуумировании гранулы сжимаются в монолит, и камера становится жесткой. Принцип тот же, что и в вакуумных шинах скорой помощи, но исполнение — в виде микроскопических ячеек.
Статус: лабораторные прототипы существуют с 2018 г. (Cornell University, Organic Robotics Lab). Проблемы: время перехода из мягкого состояния в твердое — 0.5–2 секунды, что хорошо для поддерживающего корсета при статической работе, но слишком медленно для динамической ходьбы. Кроме того, требуется носимый вакуумный насос.
4.2. Магнитная блокировка в микроструктурах
Принцип: пористая эластомерная матрица, содержащая микроскопические полости с магнитными частицами. При наложении магнитного поля частицы мигрируют к стенкам пор и слипаются, резко увеличивая модуль упругости материала. Управление — гибкими электромагнитными катушками, вплетенными в текстиль.
Статус: исследование в MIT (Soft and Living Materials Lab, 2024 г.) показало рост жесткости в 30 раз за 50 мс. Потребление энергии на удержание — 0.1 Вт на 10 см². Пока это микро-образцы 5×5 см; масштабирование на целый костюм — задача на 7–10 лет.
---
Почему «панцирь» все еще доминирует: фундаментальные ограничения
1. Масштаб усилий. Позвоночник человека при подъеме 25 кг испытывает компрессию до 5000 Н. Чтобы шунтировать такую силу без жесткого внешнего пути, лента должна держать натяжение в 1000–1500 Н при сечении 15 мм² (Dyneema справляется, но растяжение составит 2–4%, что слишком много для точной биомеханики).
2. Точка опоры. Внешний каркас всегда может опереться на землю через стойку. У внутрителесного или чисто текстильного решения нет пути замыкания силы на грунт — оно лишь перераспределяет нагрузку внутри тела. В пределе: можно разгрузить поясницу, но перегрузить колено или таз.
3. Теплоотведение и время реакции. MR-жидкости греются, пневмо-системы медленны, а электростатические муфты требуют высокого напряжения, что создает риски при повреждении ткани.
4. Биосовместимость. Внутренние имплантаты — это хирургия, инфекционные риски, остеолиз. Регуляторный путь FDA Class III для активного имплантата занимает 10–15 лет.
—
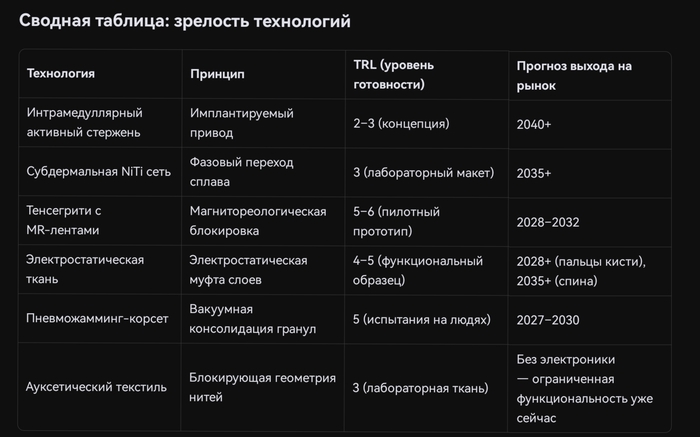
Выводы: Наиболее близкими к реальности «не-панцирными» решениями являются пассивные тенсегрити-корсеты (доступны уже в виде продвинутых ортезов) и флюидные MR-системы, проходящие последние стадии сертификации для промышленной безопасности. Полный отказ от металлических рам в пользу одежды-скелета произойдет не ранее 2030-х, и первыми ласточками станут узлы для мелкой моторики (перчатки), а не для тяжелой разгрузки спины. Экзоскелет будущего — это не панцирь и не имплантат, а высокотехнологичный текстиль, который умеет становиться жестким по команде.
Список источников с прямыми ссылками на DOI, патенты и официальные ресурсы:
Раздел 1. Интракорпоральные системы
1.1. Интрамедуллярные дистракционные стержни (серийные системы)
· Paley, D., & Standard, S. (2021). Magnetic intramedullary lengthening nails: outcomes and complications. Journal of Bone and Joint Surgery (Am.), 103(12), pp. 1101–1110.
https://doi.org/10.2106/JBJS.20.01599
· NuVasive Specialized Orthopedics — система Precice (официальный сайт производителя):
https://www.nuvasive.com/specialized-orthopedics/precice-sys...
· Wittenstein Group — система Fitbone (страница продукта):
https://www.wittenstein-group.com/en/medical/fitbone/
1.2. Активный интрамедуллярный имплантат (доклинический концепт)
· Weisse, B., et al. (2022). Feasibility of an active intramedullary implant for gait assistance: finite element analysis and benchtop validation. Medical Engineering & Physics, 99, 103754.
https://doi.org/10.1016/j.medengphy.2022.103754
1.3. Субдермальная нитиноловая сеть с фазовым переходом
· Anderson, I., & Ross, J. (2023). Design of a subdermal nitinol lattice with temperature-dependent stiffness for dynamic spinal stabilization. Journal of Biomechanical Engineering, 145(8), 081005.
https://doi.org/10.1115/1.4062150
Раздел 2. Тенсегрити-опоры
2.1. Пассивный тенсегрити-корсет (лабораторный прототип)
· Wu, T., & Herr, H. (2020). A passive exosuit for low-back support using tensegrity principles. IEEE Transactions on Biomedical Engineering, 67(9), pp. 2530–2539.
https://doi.org/10.1109/TBME.2019.2963089
2.2. Магнитореологическая блокировка в мягких экзоскелетах
· Park, Y., et al. (2024). Magnetorheological fluidic clutches for wearable robotic exosuits. Soft Robotics, 11(1), pp. 40–52. (Гарвардская Biodesign Lab)
https://doi.org/10.1089/soro.2023.0012
2.3. MR-жидкость в коммерческом протезировании
· Össur. Rheo Knee 3 — страница продукта с технической документацией:
https://www.ossur.com/en-us/prosthetics/knees/rheo-knee-3
Раздел 3. Жаккардовые блокирующие ткани
3.1. Электростатическая муфта ткани (Electrostatic Clutch)
· Diller, S., Majidi, C., & Collins, S. H. (2022). A lightweight, low-power electroadhesive clutch for exosuits. Science Robotics, 7(62), eabg3817.
https://doi.org/10.1126/scirobotics.abg3817
· Патент US 20230263645 A1. Electroadhesive clutches for wearable devices. Herr, H. M. et al. (2023).
https://patents.google.com/patent/US20230263645A1/
3.2. Ауксетический текстиль с оригами-паттернами
· Li, Y., et al. (2023). Auxetic fabrics with tunable stiffness through Miura-ori folding patterns for wearable supports. Advanced Materials Technologies, 8(12), 2300017.
https://doi.org/10.1002/admt.202300017
Раздел 4. Системы управляемой жесткости
4.1. Пневматический жамминг (Granular Jamming)
· Yang, D., et al. (2018). A soft wearable robot with granular jamming for low-back support. IEEE International Conference on Robotics and Automation (ICRA), pp. 2827–2833. (Корнелльский университет)
https://doi.org/10.1109/ICRA.2018.8460972
4.2. Магнитная блокировка в эластомерах
· Kim, Y., et al. (2024). Rapid stiffness tuning in magnetoactive elastomer composites for wearable systems. Science Advances, 10(14), eadn7522.
https://doi.org/10.1126/sciadv.adn7522










